現在はBrushless Gimbal を使っています。
コントローラは、開発中です。あなたが変更で更新滞在したい場合は、に登録してください
ニュースレター。
コントローラは、構築するために使用することができる
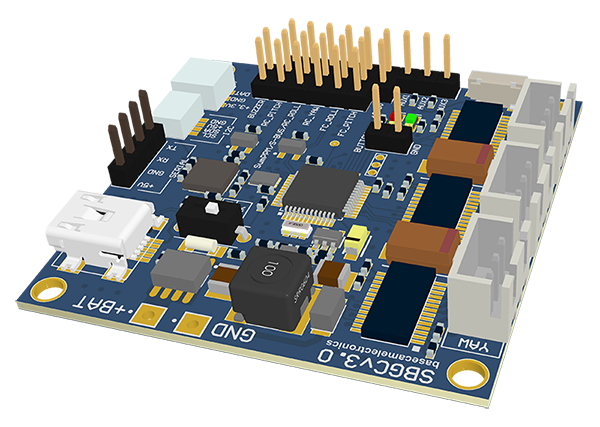
コントローラのこのバージョンは、安定化のソリューションの開発に私たちの新しい方向である。それは、バックの互換性100パーセントを維持しますが、新しいfuctionalityを追加し、SimpleBGCコントローラの前の8ビット·バージョンに置き換えられます。

実際には、BLDCモータに基づくジンバル趣味サーボに基づく定期的なジンバルと非常によく似ています。主な違いは、 - 各回転軸は、「カメラ+フレーム」システムの重心(CG)を通過して堅固にBLDCモータに接続されている。ギアの欠如 - システムの慣性を害することはありません使用していますが、利益のためにすることができます基本的なポイント。カメラの理想的なバランスの場合には、ロータは抵抗なく、さらに、カメラがUAVフレームからの外乱を発揮することができ、余分な制御力を印加することを必要とせずに自由に回転する。また、バックラッシュの固有の歯車やベルトがありません。
モータを制御するために、特別なコントローラを設計した。これは、カメラ·プラットフォーム上に実装ジャイロスコープ及び加速度計からの情報を受信する。標準IMUアルゴリズムは、カメラの傾斜角を定義するために使用される。リモートコントロールで、オペレータセットは傾斜角を所望。PIDコントローラは、補償金の額を算出し、巻線内の電流を制御し、従って、ステータの磁界ベクトルの向き電源ユニットにコマンドを送信する。磁場は、正しい位置にローターを移動します。
原因IMUを使用するには、システムの機械的な部分が非常に簡単です。各軸の複雑で高価な高精細エンコーダで必要はない。ただ、雲台に小さなIMUボードをマウントし、コントローラとモータに配線を接続し、すべてやった!
それは、通常のサーボと比べて安定化の印象的な品質を提供します。
 [1回]
[1回]
カレンダー
最新記事
最新CM
カテゴリー
プロフィール
ブログ内検索
最古記事
リンク
Google+
バーコード
アクセス解析
カウンター
